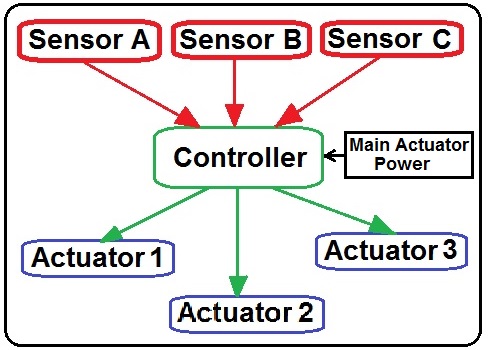
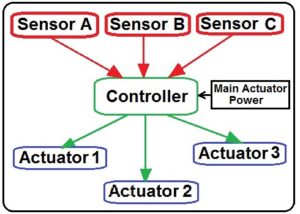
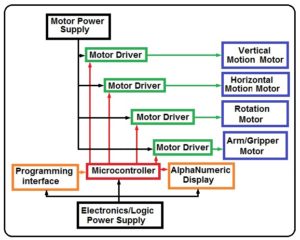
There is an actuator to fulfill every requirement. But, actuators can’t do the job without a plan to follow. The plan comes in the form of a program delivered by a motor controller. The typical modern controller is comprised of two systems. The first is the Microcontroller that stores and executes the control program. The second is the driver which receives the controlling signals and switches the main actuator power on and off as needed. The block diagram below shows the basic system.
The most important specifications when choosing a motor controller are listed below in random order:
Size and weight (usually related to maximum current.)
Motor Controller type (used for Brushed DC motor control, Brushless DC motor control, Servo Motor Control, or Stepper Motor Control
Nominal Voltage, (usually a voltage range.)continuous current (should be at least 25% greater than required.)
Control method (Serial, analogue, or digital.)Single or dual control channel.
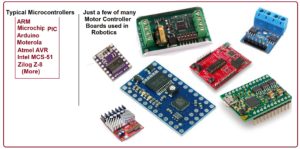
The selection of a motor controller with regards to its ability to control the actuators you are using is required. A second requirement is that you are able to or at least learn to program in a language compatible with the resident microprocessor. You can program using one of the high level languages(e.g. C, C++, Basic) if a compiler is available to create the appropriate executable program Most popular microprocessor assembly languages have C compilers available. The motor controller boards built around the PIC micro-controller by Microchip meet a wide variety of robotics needs. The price of the PIC is one of the most attractive features for hobbyist robot builders.
My next post will be about the various sensors and other input devices used in robotics
Return to Robotics Posts List