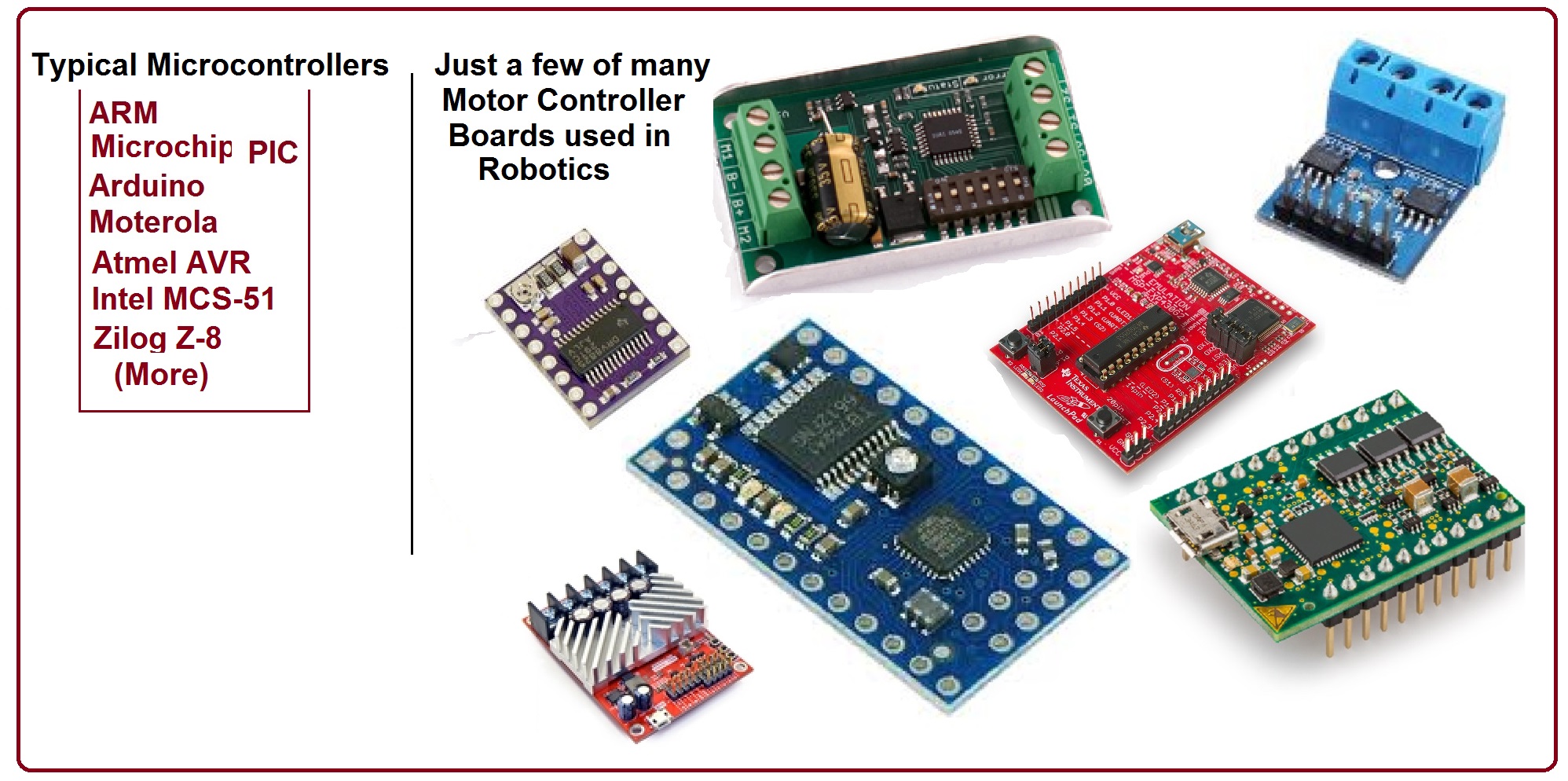

The reason behind my decision to use the Arduino micro-controller board to control our object avoidance robot was to minimize the builder’s need for a background in coding. The Arduino has a multitude of small pre-programmed routines called Sketches that could allow the user to ease their way into learning coding techniques. A listing of the snippets and sketches can be found by clicking here! This shows how flexible the Arduino can be.

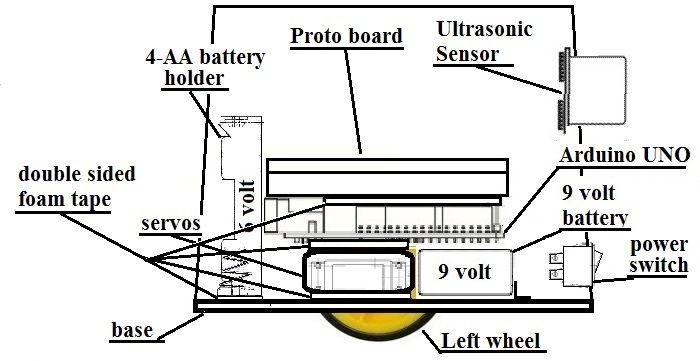
There are several Arduino boards which would work to control our robot. Most would be an overkill. The number of digital input and output pulse width modulation pins, speed, power requirements, and price are all of prime importance. Although we only require a total of two output pins to control the servos and one input pin coming from the sensor board, it would be nice to have a couple of
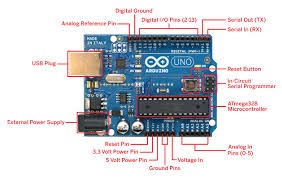
extra in the event, we wanted to add another servo. The  Arduino Uno Rev3 is a microcontroller board has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz quartz crystal, a USB connection, a power jack, an ICSP header, and a reset button. All that is required is to connect it to a computer with a USB cable or power it with an AC-to-DC adapter or battery and you are in business. You can experiment with your UNO without worrying too much about doing something wrong.
Arduino Uno Rev3 is a microcontroller board has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz quartz crystal, a USB connection, a power jack, an ICSP header, and a reset button. All that is required is to connect it to a computer with a USB cable or power it with an AC-to-DC adapter or battery and you are in business. You can experiment with your UNO without worrying too much about doing something wrong.
The small size of the UNO board and low cost of under twenty dollars makes the UNO ideal for this application.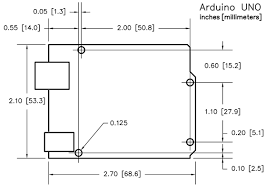
Another possible addition to this project would be an LCD display to provide a distance readout or warning message when approaching an object. An LED or beep could also be added to act as a warning.
More details on all the parts and construction are available at “Fun Robot Parts“
Back to Fun Robot Project List