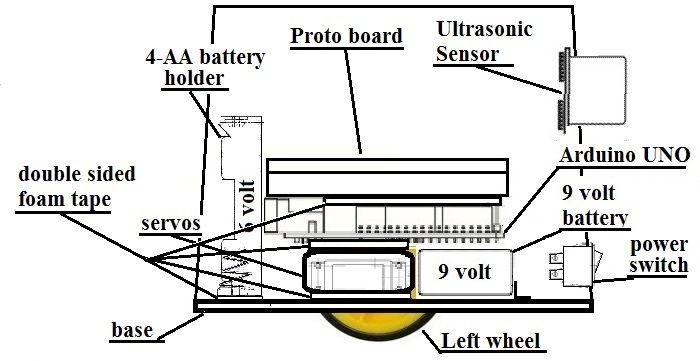
To avoid an object, it only makes sense that the robot has to know when one is present. In our case, we will use an ultrasonic proximity board. This device transmits ultrasonic pulses and listens for them to be reflected. Using the elapse time between the transmit and receive pulses it is possible to calculate the distance an object is from the sensor.
The primary components on the ultrasonic proximity board are the transmitter and receiver transducers. These components utilize polarized ceramic piezoelectric discs to generate and receive the ultrasonic pulses required for the ranging operation. The data from the proximity board is processed by the Arduino microcontroller board which in turn controls the motion servos.

Even though the transmit and receive transducers can be purchased individually and the additional associated circuitry could be built from discrete components, the least expensive and easiest solution is to use the ultrasonic proximity sensor board. This prefabricated product only requires mounting and a power supply to function. The board provides a signal output to the Arduino microcontroller that, with the appropriate programming can drive and steer the robot to avoid a collision.
Although the ultrasonic proximity sensor board can be obtained from other sources,

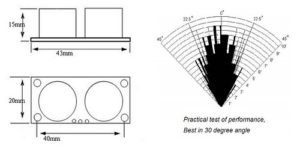
Power Supply: 5V DC
Quiescent Current : <2mA
Effectual Angle: <15°
Ranging Distance : 2cm – 500 cm/1″ – 16ft
Resolution: 0.3 cm (more info on setting up the rangefinder is at https://www.youtube.com )
v=Ea4CGAw6b_M
More details on all the parts and construction are available at “Fun Robot Parts“
Back to Fun Robot Project List

- Cool Sonar Ranging Board