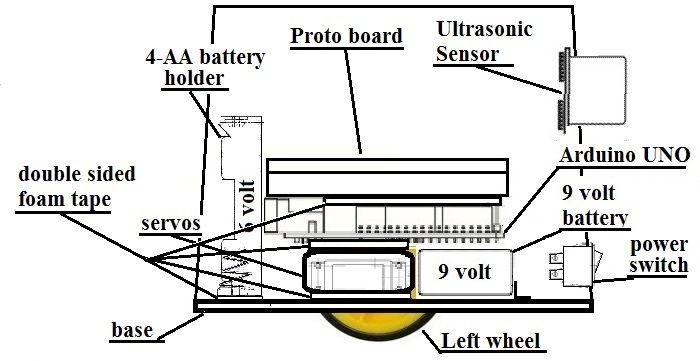

Testing the ultrasonic object avoidance robot is simple enough. Just turn on the Power switch and the blue LED should start blinking. The green LED should light up and the wheels should move the robot forward in a straight line. As the robot approaches a wall or other object, the green LED should go off, the red LED should come on. The robot should stop rotate to find an open path. Once safe, the red LED should go out and the green LED will come back on.
The robot should commence on a forward path. If the object avoidance robot is wired correctly and it is not sequencing properly, obviously the program needs to be adjusted.
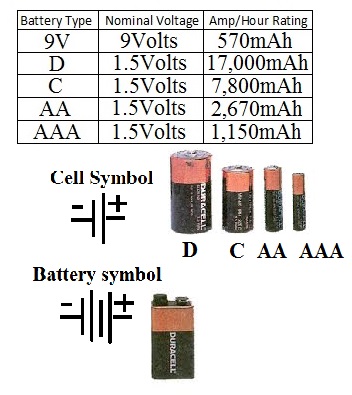
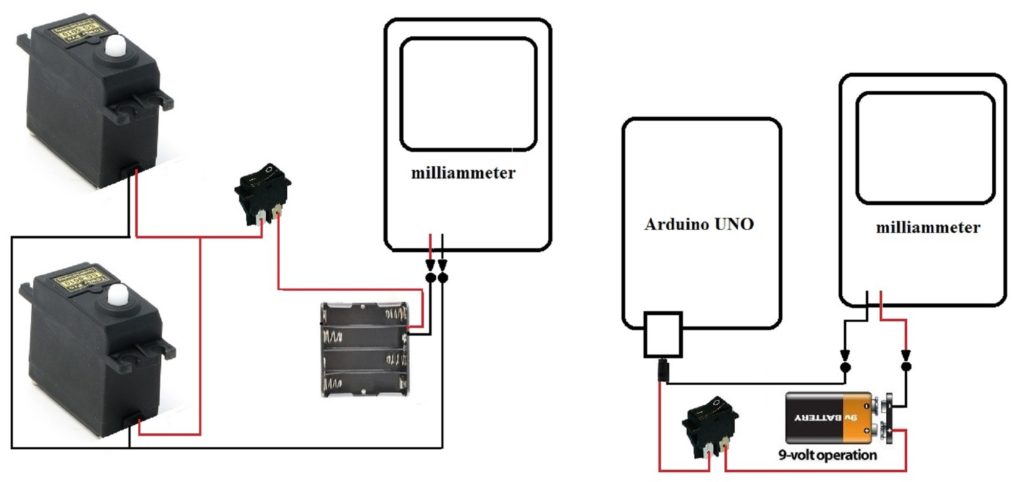
Another interesting test would be to out find how much current is being drawn from the batteries during various points in the operation of the robot. The drawings below show the connections for a milliammeter to make the current measurements:

This concludes the Arduino ultrasonic object avoidance robot project. The next series of posts will deal with basic electronic principles with some robotics terms and principles thrown in.
I will start from the very beginning with a little atomic theory. Although atoms are made up of a number of smaller particles only three are of primary interest for our purposes. The neutron, proton, and electron which are the basic building blocks of the atom. Danish physicist Niels Bohr in 1913 came up with a theoretical model of the atom. The Boar model explains the theory behind static electricity, magnetics, current flow, voltage, and semiconductors. His model says the center called the nucleus contains neutrons and protons. Orbiting the nucleus are electrons. Without going into too much depth, the next post will provide pertinent information about the Bohr model.
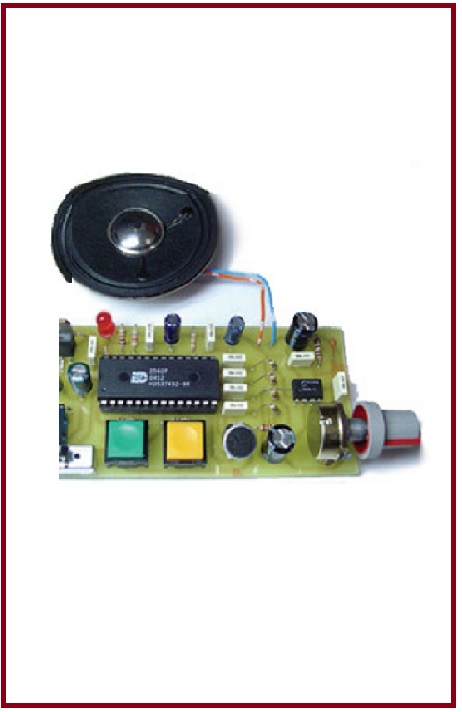
Hopefully, your Fun Robot tested O.K. and you can start on another project.
More details on all the parts and construction are available at “Fun Robot Parts“.
Back to Fun Robot Project List.