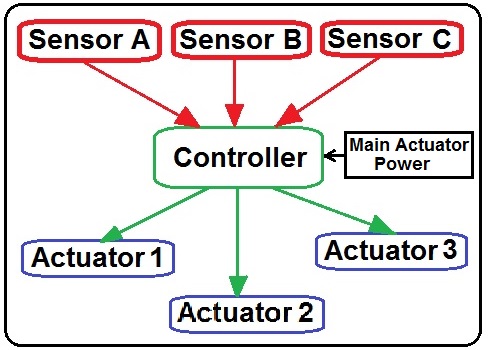
Robotic Sensors are used to provide environmental, physical position and self-diagnosis data to feed an actuator controller. The controller drives motors along with a variety of other actuators. The sensing capability of robotics is based on the human’s five senses. Due to the digital accuracy of modern electronics human abilities are sometimes surpassed by robots. Here I will discuss some of the types of sensors making robotics possible.
Light Sensors: Photoconductive and Photovoltaic cells are used to sense luminosity, darkness, or even for color discrimination. Active current, voltage signals or passive resistive changes directly from or from electronic sensor circuitry can be processed by a microcontroller to do an unlimited number of different tasks.

Here is a circuit and the control program for an Arduino Mega controller board that turns two LEDs on when the light level drops below a certain level(150).

const int led=3; // variable which stores pin number
void setup()
{
pinMode(led, OUTPUT); //configures pin 3 as OUTPUT
}
void loop()
{
int sensor_value = analogRead(A0);
if (sensor_value < 150)// the point at which the state of LEDs change
{
digitalWrite(led, HIGH); //sets LEDs ON
}
else
{
digitalWrite(led,LOW); //Sets LEDs OFF
}
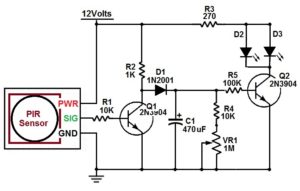
}Infra-Red (IR) Sensors and Passive Infra-Red (PIR) Sensors are used in robots for ranging, motion detection, and measuring IR content among other applications. Below is an example of a circuit using a PIR sensor to switch on two LEDs for an adjustable time when proximity is detected.
The ultrasonic transducer is another sensor type found as an integral part of robotics. The most prevalent application for ultrasonic transducers are distance and range.
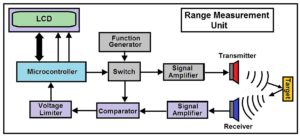
Generally, an ultrasonic transmitter and an ultrasonic receiver are required. Another great robotics application using ultrasonic transducers is for Object avoidance.
Return to Robotics Posts List